依靠純路側感知實現自動駕駛 Apollo Air百度的新噱頭?
在經歷前兩年的低谷期后,今年自動駕駛領域又開始熱鬧起來。當很多車企和科技公司還在花大力氣鉆研單車智能時,百度開始將目光轉向路側端的智能化。因為只有實現車路協同,才能助力自動駕駛技術邁向更高級別。
近日,百度聯合清華大學智能產業研究院(AIR)重磅發布了Apollo Air計劃。據了解,這是全球首次、也是惟一使用純路側感知能力,真正實現開放道路連續路網L4級自動駕駛閉環的車路協同技術,是車路協同領域的最高技術能力體現,將是全球智能出行領域的重大技術突破。
♦依靠純路側感知實現自動駕駛
Apollo Air計劃有三大特點:依靠純路側感知實現自動駕駛、持續降維反哺車路協同產品、標準開源開放實現業界共享。
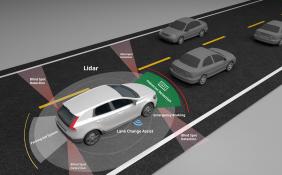
百度智能交通產品研發總經理陶吉介紹,Apollo Air技術的創新之處在于,在不使用車載傳感器,僅依靠路側輕量感知的前提下,利用V2X、5G等無線通信技術就可以實現車-路-云協同的L4級自動駕駛。相當于,Apollo Air技術替換了一個穩定的自動駕駛系統的感知系統,通過車-路-云配合實現自動駕駛。
比起單車智能,Apollo Air技術的復雜性更高、系統鏈條更長。陶吉表示,通過Apollo Air技術賦能路端網聯產品,一輛具備有限算力、無車載感知設備的汽車也能在該路段實現部分高級別自動駕駛能力,相當于讓一輛有人車升級具備部分無人車的能力。
經過不斷研究和反復測試,目前百度智能交通團隊和清華智能產業研究院已經完成對北京亦莊、廣州黃埔、滄州等若干路口的智能化改造,實現了Apollo Air純路側感知技術在L4真實場景的測試。通過不斷打磨迭代Apollo Air純路側感知技術,百度會持續反哺現有的智能路口解決方案,將技術降維釋放給車路協同量產產品,為共享無人車運營和高級別輔助駕駛提供高可靠性的路側感知數據。
陶吉還介紹,百度與清華智能產業研究院發布的Apollo Air計劃,是行業發展到無人化、規模商業運營新階段的必然需求,也是對現有的車路協同技術的一次全面升級,只有以高可靠性、高準確率的路側感知技術的提升來加強車路協同的融合感知框架,才能更好地為自動駕駛提供安全保證。“Apollo Air計劃就是讓車路協同真正成為單車智能在黑夜里的一盞明燈。”
陶吉強調了“單車智能+車路協同”技術的價值。單車智能是自動駕駛的基礎,但其感知能力難以完全解決復雜場景的長尾問題,同時自動駕駛汽車生產成本短期居高不下,不足以支撐自動駕駛汽車商業化規模量產。他認為,單車智能+車路協同是中國自動駕駛產業快速發展的最優解。自動駕駛的落地,必須單車智能與車路協同兩條腿走路。
這也意味著車路協同技術需要有極高的穩定性、可靠性。而在現有的車路協同技術路線中,往往是以車載感知為主、路側感知為輔。在車載強感知的情況下,路側感知可能存在的問題和缺陷并不能得到充分暴露和快速改進提升。這也是百度和清華智能研究院聯合發起Apollo Air計劃的原因,通過打造車路協同的最高技術能力,為自動駕駛提供更可靠的安全冗余。
下一步,百度和清華智能產業研究院會通過開源、標準化的方式,定期披露Apollo Air的相關研發案例和數據,不斷明確符合自動駕駛需求的基礎設施技術條件,將Apollo Air打造成業界共享的車路協同技術平臺。
♦本質依然是車路協同
清華大學智能產業研究院院長張亞勤將Apollo Air計劃,評價為對中國車路協同技術無人區的一次探索。
一位不愿具名的業內資深技術專家認為,Apollo Air計劃的技術出發點是正確的,即利用基礎設施的感知來降低對車輛計算和感知能力的要求,尤其在當單車智能遇到較難處理的復雜環境時,路側感知可以彌補單車智能感知的缺陷,對自動駕駛在終端的落地是一種很好的促進。
“需要強調的是,Apollo Air并不是說要取代單車智能,更多的是彌補單車智能的不足,最后促使單車智能和車路協同共同向前發展。事實上,很多科技企業和高校院所在自動駕駛單車智能領域做了大量研究,基于路側基礎設施角度做自動駕駛的相對較少,百度和清華選擇這一路線算是另辟蹊徑。”上述專家說。
不僅不要激光雷達,其他車載傳感器基本也不用打開,乍一聽這樣的L4自動駕駛技術方案,難免有些出乎意料。賽迪研究院賽迪顧問有限公司汽車產業研究中心高級分析師邵元駿指出,只是宣傳口徑的問題,聽起來有些絕對,但實際上技術路線的方向是正確的,本質上還是一種車路協同。
邵元駿分析,通過單車智能實現自動駕駛,需要先進的激光雷達和芯片,這樣高昂的成本對于自主品牌中低端車型來說,顯然難以接受。而我國的基礎設施建設能力和政府統籌規劃能力較強,可以將一部分車上的感知功能放在路側,實現冗余感知,對單車感知的錯誤進行糾正和補充,進而實現更高級別的自動駕駛。
從邏輯上來說,將全部感知都放在路側是不現實的,因為一旦出現交通事故誰是責任方很難界定。其實百度方面一直在考慮是否要承擔起基建商的角色,在新基建的建設方面投入更多,就是為了推動單車智能與智慧的路相結合,這種思路符合未來發展方向。
實際上,車路協同一直以來被認為是中國自動駕駛發展技術路線的獨特之處,甚至可以說是中國比其他國家更早實現自動駕駛落地的關鍵所在。中國的路況在世界范圍內屬于比較復雜的范疇,這就給L4自動駕駛的落地帶來了“最后1%”的問題。
想要讓自動駕駛技術在中國更快落地,同時也給無人車再上一道安全保險,車路協同可以說是當前的最佳方案。車路協同和智能汽車也是可以預見的革命性變化,百度的Apollo Air計劃堪稱先行者。并且,像Apollo Air這樣開源開放的平臺,也有利于車路協同技術的共享和產業標準化的實現。
♦商業模式仍存在困局
的確,車路協同是當下中國自動駕駛發展的最優解決方案。因為車路協同擁有的超視距感知,能夠很好地彌補L3、L4自動駕駛的感知能力,彌補單車感知系統存在的視角盲區和距離感知的技術缺陷,讓自動駕駛更安全。因此,自動駕駛的商業落地,必須單車智能和車路協同兩條腿走路。
知乎答主“北京理工大學機器人孔博士”認為,百度在自動駕駛方面就采用了“兩條腿”走路的策略,既有基于車載感知的自動駕駛Apollo計劃,又有與清華大學合作的側重車路協同的Apollo Air計劃。
特別是Apollo Air計劃迭代的純路側感知技術將持續反哺百度的車路協同方案,提升無人駕駛方案的魯棒性和安全性。車、路、云之間的數據接口,將通過開源及標準化方式推動開放、實現業界共享,持續提升云端的能力。
至于單車智能和車路協同哪個路線走得更快,這取決于激光雷達降價更快,還是智慧道路建設更快。但無論如何,百度已經在自動駕駛這條賽道上占據了重要的一席之地。
當然,也有對Apollo Air計劃的質疑聲。行業專家陳超卓指出,純靠路側方案,博世最早的L4自主泊車方案就是純靠停車場的傳感器引導車去找車位泊車,所以從概念上不是百度首創,已經在中國SAE自主泊車標準中發布。
純場端無人泊車方案、純車端方案、車/場融合方案,三者中歐洲偏向場端方案,好處是簡單無死角,壞處是擴展性差,改造一個停車場成本極高(近千萬元),不可能每個停車場都如此操作,因為投資方主體不明確。汽車廠不可能投資,政府也不愿投資,停車場也不會做這種收益不大的投資,最有可能是車/場融合方案,單車智能加少量場端設施增加安全可靠性,場端投資減少一個數量級,靠標準化攤薄停車場投資。
陳超卓說,如果把“停車場”換成“路”,場端就變成路端,優缺點是一樣的,要么路端智能,要么車端智能,要么就是車路協同。把一條條道路都裝備好,可能性不大,投資主體是誰?收費模式和經濟效益是什么?很多問題還沒有想清楚,在商業模式上還存在一些困局。
也有自動駕駛業內人士認為,Apollo Air計劃是百度又一次刷存在感的做法。Apollo Air 做Demo可以,但要大規模實現商業落地難度很大,甚至會高于單車智能。
邵元駿也持類似觀點,智慧的路新基建投入非常巨大,這個問題是比較棘手的,所以車企現在的新品研發大多沒有押寶“車路協同”,而是依然在以單車智能為主,因為在沒有智慧的路之前,車企也不知道路會是怎樣,車該怎么與路配合,所以就出現了困獸效應,誰都不敢邁出第一步。(郝文麗)
責任編輯:hnmd003